Pictures presenting our team members during project activities, software, instruments and devices developed




System testing: ultrasound Endoscopy with hybrid imaging and navigation – Ponderas Academic Hospital


ENDORO robot – version 2 – testing (Laboratory of Microtechnology and Medical Engineering, INCESA, University of Craiova, Romania)


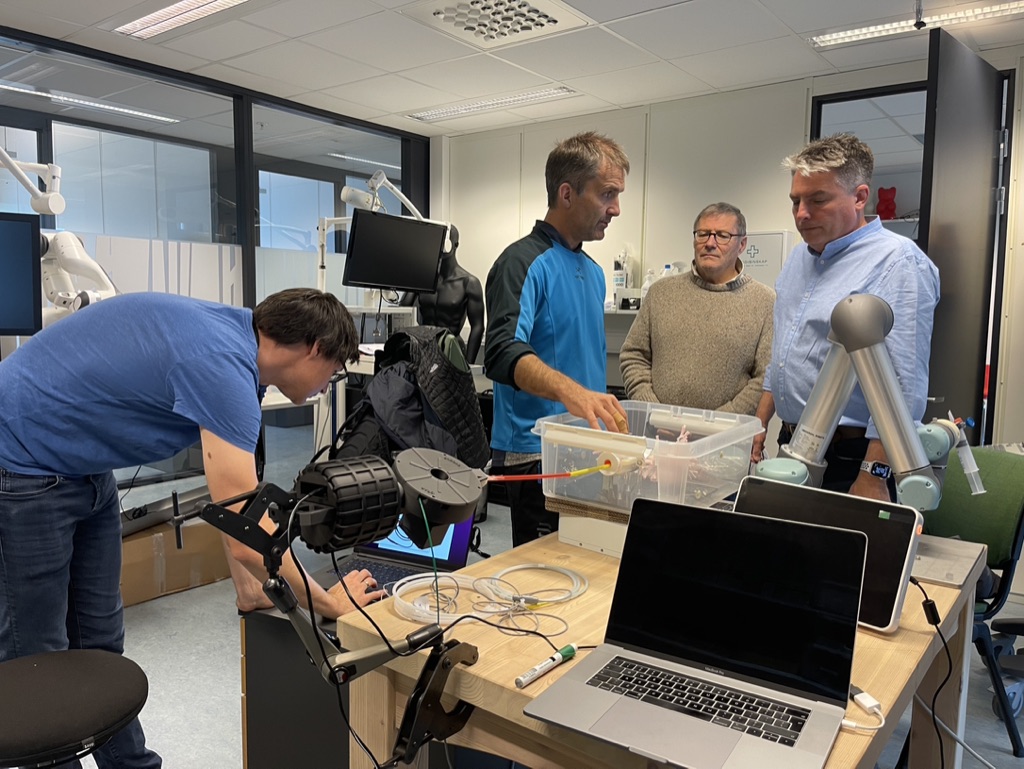





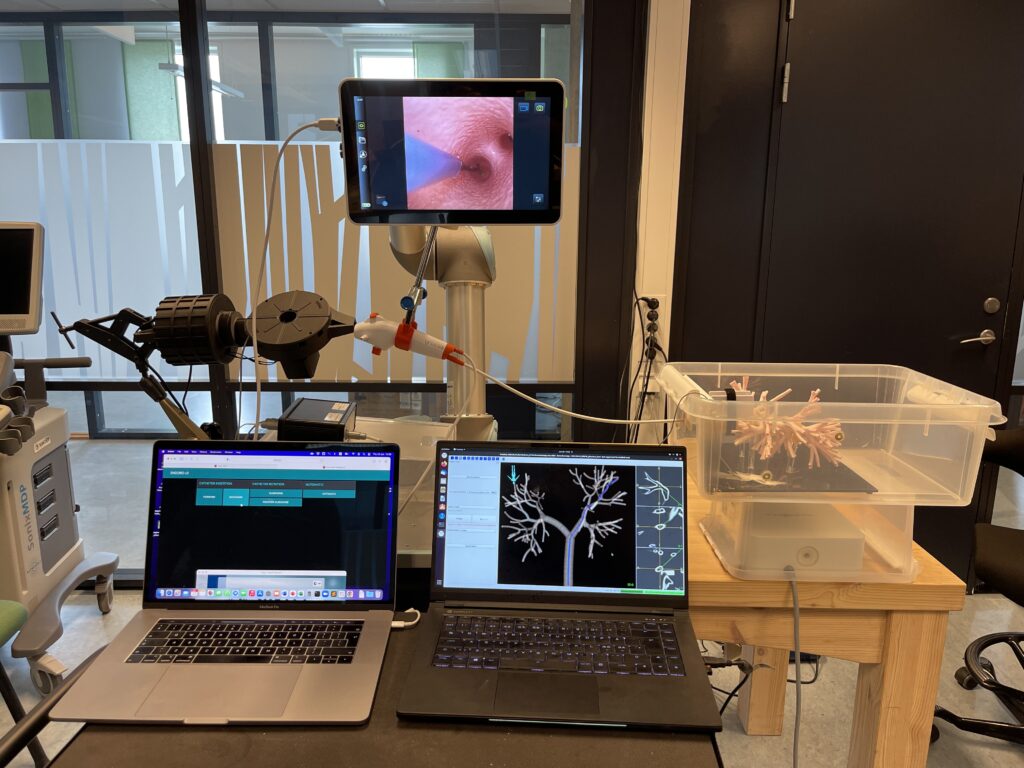
System testing – Norway
- ENDORO Robot v2 – testing on a flexible phantom, with planning and visualisation using iMTECH software and the motors control using a a joystick (movie here) (movie here)
- ENDORO Robot v3 – testing on a rigid lung phantom, with planning and visualisation using iMTECH software and the motors control using a Node-Red application (movie here)
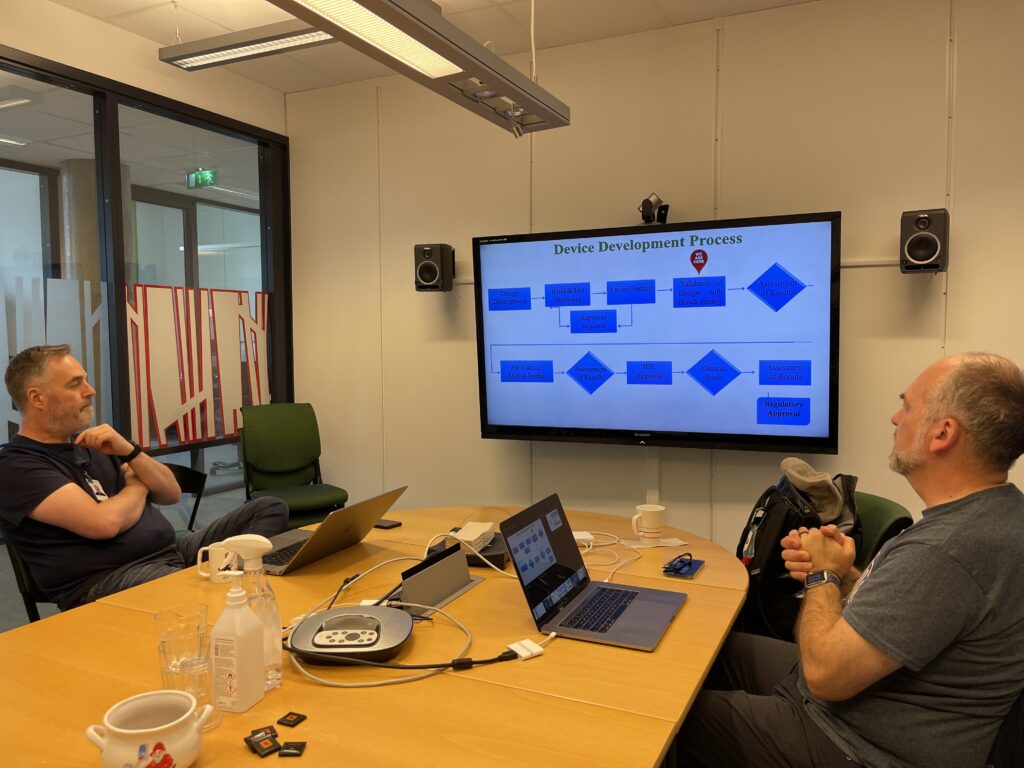
- Research in the spotlight (movie here)